2025
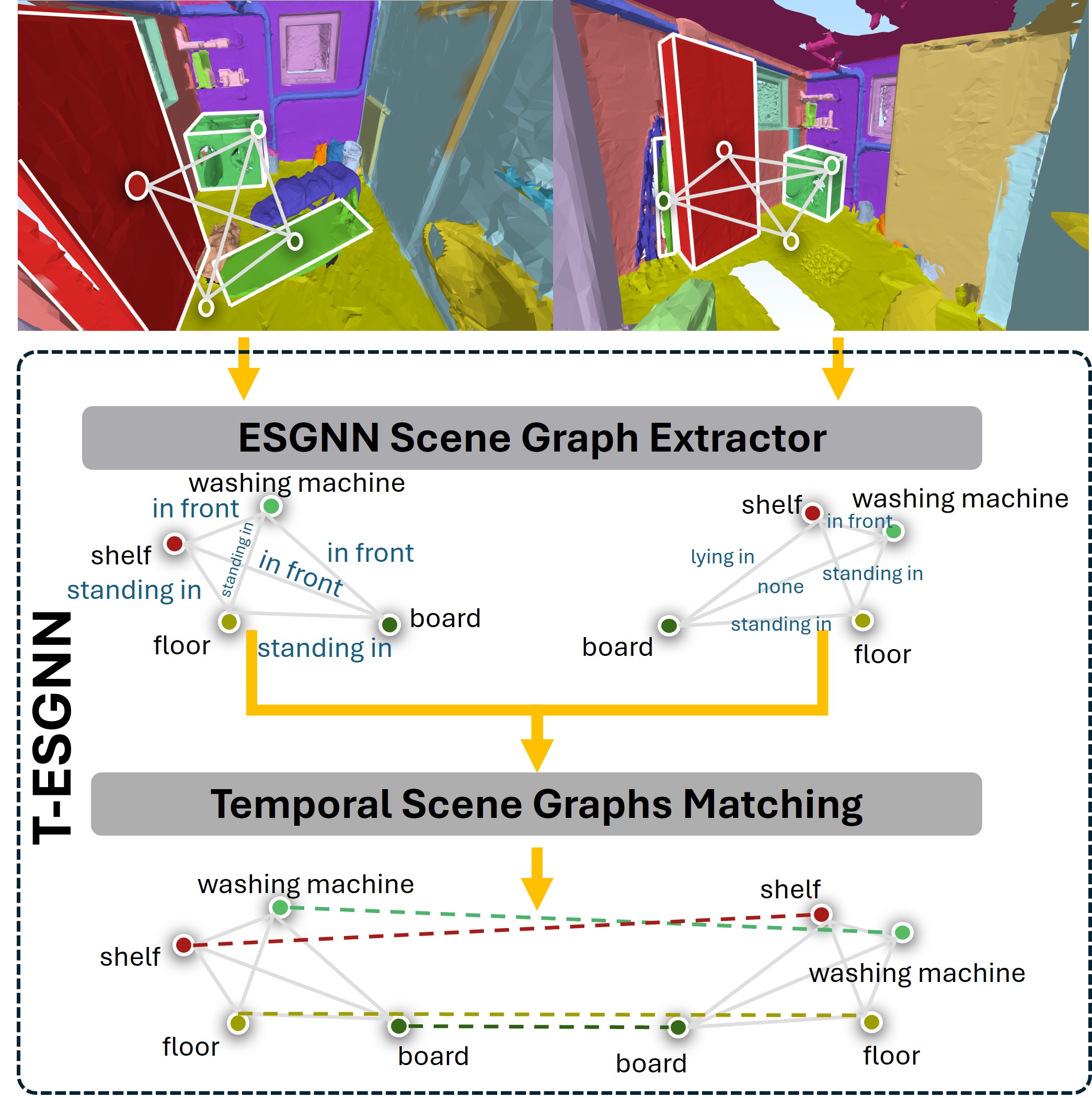
TESGNN: Temporal equivariant scene graph neural networks for efficient and robust multi-view 3d scene understanding
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Lan Ngo Chi, Truong Do Tho, Dezhen Song, Truong-Son Hy,
Transactions on Machine Learning (TMLR)
An improve of ESGNN with temporal layer making the generated graph can evolute over times.
TESGNN: Temporal equivariant scene graph neural networks for efficient and robust multi-view 3d scene understanding
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Lan Ngo Chi, Truong Do Tho, Dezhen Song, Truong-Son Hy,
Transactions on Machine Learning (TMLR)
An improve of ESGNN with temporal layer making the generated graph can evolute over times.
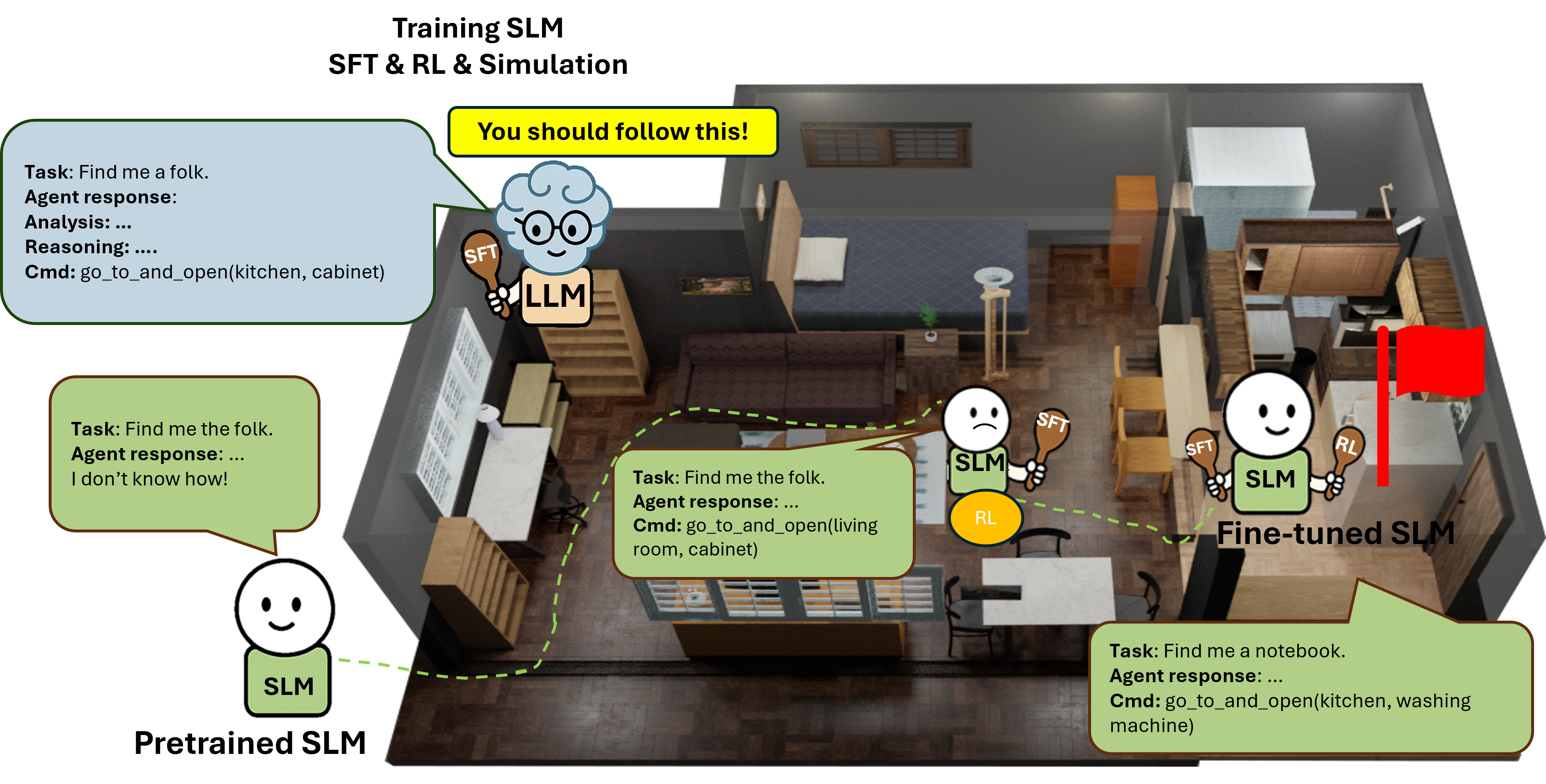
SmallPlan: Leverage Small Language Models for Sequential Path Planning with Simulation-Powered, LLM-Guided Distillation
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Hoai Nhi Doan, Cuong Anh Pham, Kentaro Inui, Dezhen Song
Submitted to 2026 ICRA
Distilled into small language models for efficient path planning under constraints
SmallPlan: Leverage Small Language Models for Sequential Path Planning with Simulation-Powered, LLM-Guided Distillation
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Hoai Nhi Doan, Cuong Anh Pham, Kentaro Inui, Dezhen Song
Submitted to 2026 ICRA
Distilled into small language models for efficient path planning under constraints
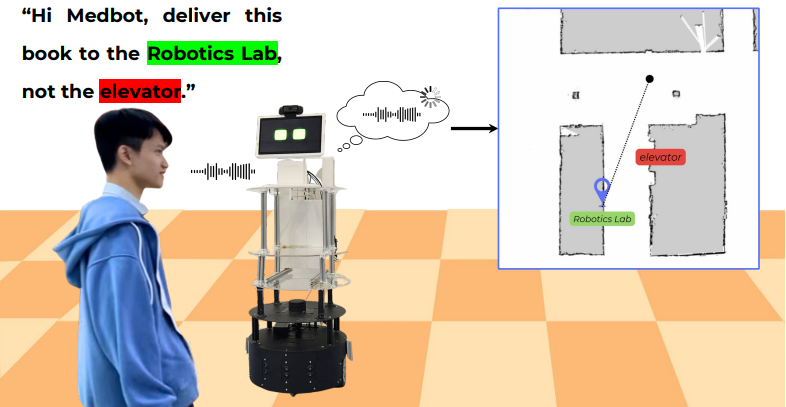
Development of a Cost-effective On-device Natural Language Command Navigation System for Mobile Robots in Challenging Indoor Scenarios
Tung T Ngo, Khoi TN Nguyen, Duc Q Nguyen, Khuyen G Pham, Khoi HM Hoang, Quang Pham Phuoc Minh, Truong Do Tho
2025 IEEE/SICE International Symposium on System Integration (SII)
BERT-based nature language command navigation.
Development of a Cost-effective On-device Natural Language Command Navigation System for Mobile Robots in Challenging Indoor Scenarios
Tung T Ngo, Khoi TN Nguyen, Duc Q Nguyen, Khuyen G Pham, Khoi HM Hoang, Quang Pham Phuoc Minh, Truong Do Tho
2025 IEEE/SICE International Symposium on System Integration (SII)
BERT-based nature language command navigation.
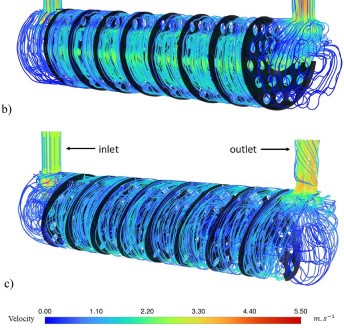
A novel shell-and-tube heat exchanger design with alternative inclined baffles
Huy Minh Khoi Hoang, Hai-Lam Cao, Quang Pham Phuoc Minh, Ahmad Hajjar, Vu Linh Nguyen
Case Studies in Thermal Engineering (Q1)
Improve the Heat Exchanger efficiency through baffles modification
A novel shell-and-tube heat exchanger design with alternative inclined baffles
Huy Minh Khoi Hoang, Hai-Lam Cao, Quang Pham Phuoc Minh, Ahmad Hajjar, Vu Linh Nguyen
Case Studies in Thermal Engineering (Q1)
Improve the Heat Exchanger efficiency through baffles modification
2024
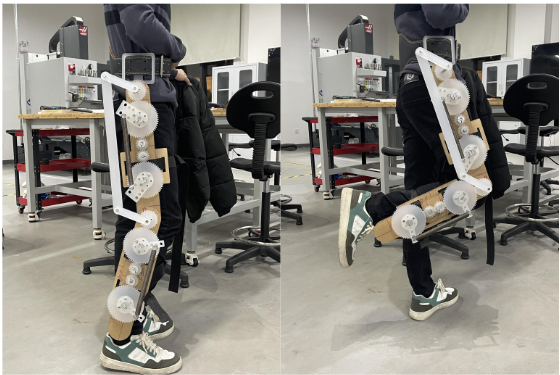
Towards A Wearable Passive Lower-Limb Exoskeleton Based on the Compact Gear-Spring Mechanism
Quang Pham Phuoc Minh, Hung Quang Nguyen, Quan Minh Vo, Tien Lai Dac, Hien Vu Thu Nguyen, Vu Linh Nguyen
2024 IEEE International Conference on Robotics and Biomimetics (ROBIO)
Passive exoskeleton design utilizing a compact gear-spring mechanism (CGSM) for lower-limb rehabilitation.
Towards A Wearable Passive Lower-Limb Exoskeleton Based on the Compact Gear-Spring Mechanism
Quang Pham Phuoc Minh, Hung Quang Nguyen, Quan Minh Vo, Tien Lai Dac, Hien Vu Thu Nguyen, Vu Linh Nguyen
2024 IEEE International Conference on Robotics and Biomimetics (ROBIO)
Passive exoskeleton design utilizing a compact gear-spring mechanism (CGSM) for lower-limb rehabilitation.
ESGNN: Towards Equivariant Scene Graph Neural Network for 3D Scene Understanding
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Lan Ngo Chi, Truong Do Tho, Truong-Son Hy,
2024 IEEE International Conference on Robot and Human Interactive Communication (ROMAN) - Late Breaking Report
We propose ESGNN, the first method to use Equivariant Graph Neural Networks for semantic scene graph generation from 3D point clouds. By preserving geometric symmetries, ESGNN achieves superior accuracy, faster convergence, and lower computational cost, making it well-suited for real-time applications in robotics and computer vision.
ESGNN: Towards Equivariant Scene Graph Neural Network for 3D Scene Understanding
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Lan Ngo Chi, Truong Do Tho, Truong-Son Hy,
2024 IEEE International Conference on Robot and Human Interactive Communication (ROMAN) - Late Breaking Report
We propose ESGNN, the first method to use Equivariant Graph Neural Networks for semantic scene graph generation from 3D point clouds. By preserving geometric symmetries, ESGNN achieves superior accuracy, faster convergence, and lower computational cost, making it well-suited for real-time applications in robotics and computer vision.