
I am a MSc student in Robotics at MBZUAI, advised by Dezhen Song. I'm interested in developing AI solutions for robotics, particularly leveraging small language models and knowledge distillation for path planning, scene understanding through graph neural networks, tactile sensing for manipulation tasks, and vision-based localization systems for resource-constrained robotic applications.
Before joining MBZUAI, I earned my BSc in Mechanical Engineering from VinUni, where I founded the university's first robotics lab and secured $35,000 in funding to advance modern robotics research in collaboration with professors worldwide. I also had the opportunity to study abroad as an exchange student at Technion in Israel.
Besides, I am a

Warning
Problem: The current name of your GitHub Pages repository ("Solution: Please consider renaming the repository to "
http://".
However, if the current repository name is intended, you can ignore this message by removing "{% include widgets/debug_repo_name.html %}" in index.html.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Selected Publications (view all )
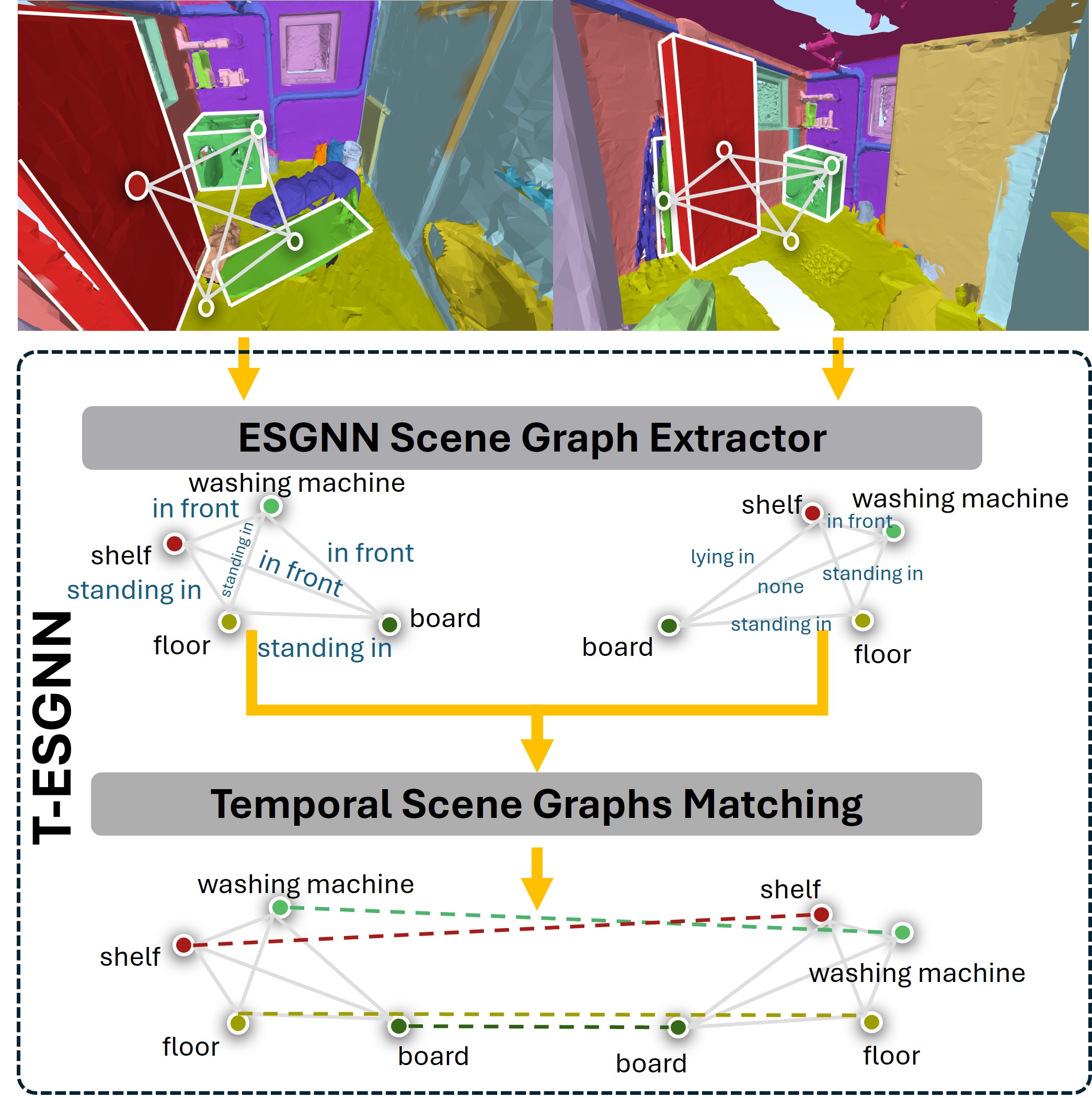
TESGNN: Temporal equivariant scene graph neural networks for efficient and robust multi-view 3d scene understanding
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Lan Ngo Chi, Truong Do Tho, Dezhen Song, Truong-Son Hy,
Transactions on Machine Learning (TMLR)
An improve of ESGNN with temporal layer making the generated graph can evolute over times.
TESGNN: Temporal equivariant scene graph neural networks for efficient and robust multi-view 3d scene understanding
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Lan Ngo Chi, Truong Do Tho, Dezhen Song, Truong-Son Hy,
Transactions on Machine Learning (TMLR)
An improve of ESGNN with temporal layer making the generated graph can evolute over times.
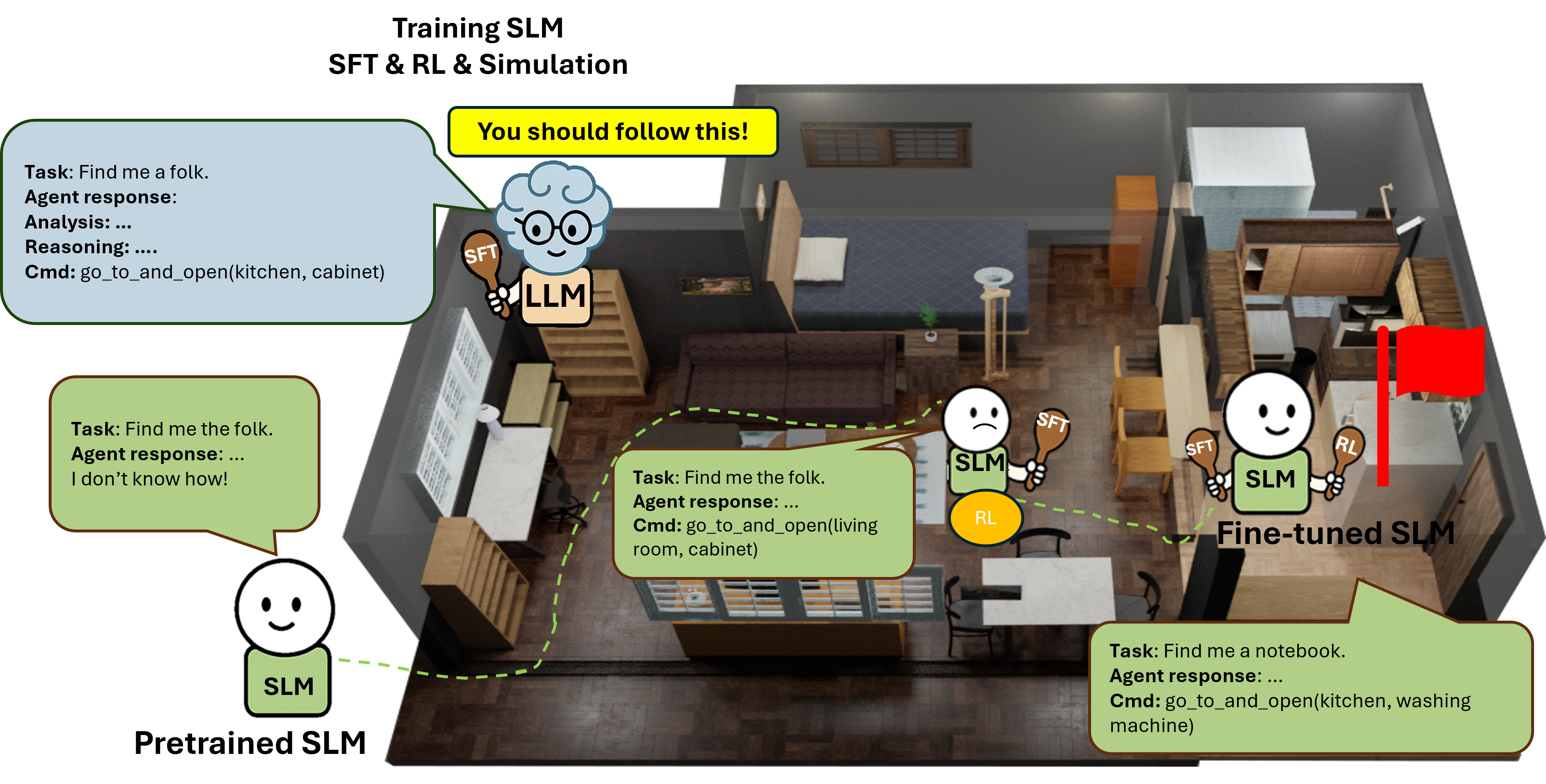
SmallPlan: Leverage Small Language Models for Sequential Path Planning with Simulation-Powered, LLM-Guided Distillation
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Hoai Nhi Doan, Cuong Anh Pham, Kentaro Inui, Dezhen Song
Submitted to 2026 ICRA
Distilled into small language models for efficient path planning under constraints
SmallPlan: Leverage Small Language Models for Sequential Path Planning with Simulation-Powered, LLM-Guided Distillation
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Hoai Nhi Doan, Cuong Anh Pham, Kentaro Inui, Dezhen Song
Submitted to 2026 ICRA
Distilled into small language models for efficient path planning under constraints
ESGNN: Towards Equivariant Scene Graph Neural Network for 3D Scene Understanding
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Lan Ngo Chi, Truong Do Tho, Truong-Son Hy,
2024 IEEE International Conference on Robot and Human Interactive Communication (ROMAN) - Late Breaking Report
We propose ESGNN, the first method to use Equivariant Graph Neural Networks for semantic scene graph generation from 3D point clouds. By preserving geometric symmetries, ESGNN achieves superior accuracy, faster convergence, and lower computational cost, making it well-suited for real-time applications in robotics and computer vision.
ESGNN: Towards Equivariant Scene Graph Neural Network for 3D Scene Understanding
Quang Pham Phuoc Minh, Khoi Nguyen Tiet Nguyen, Lan Ngo Chi, Truong Do Tho, Truong-Son Hy,
2024 IEEE International Conference on Robot and Human Interactive Communication (ROMAN) - Late Breaking Report
We propose ESGNN, the first method to use Equivariant Graph Neural Networks for semantic scene graph generation from 3D point clouds. By preserving geometric symmetries, ESGNN achieves superior accuracy, faster convergence, and lower computational cost, making it well-suited for real-time applications in robotics and computer vision.
Education
-
 Mohamed bin Zayed University of Artificial IntelligenceDepartment of Robotics
Mohamed bin Zayed University of Artificial IntelligenceDepartment of Robotics
M.Sc. StudentAug. 2024 - present -
 VinUniversityCollege of Computer Science and Engineering
VinUniversityCollege of Computer Science and Engineering
B.Sc. in Mechanical EngineeringAug. 2020 - Jun. 2024